Люди воспринимают многое как должное. Например, наш способ ходьбы. В процессе координации задействовано более 600 мускулов, благодаря чему мы можем ходить по самой неровной поверхности. Для робота такие поверхности могут быть непреодолимым препятствием.
Исследователи из калифорнийского университета в Сан-Диего обнаружили, что помочь им может обувь. При помощи латекса и кофейной гущи удалось разработать ступни, которые позволяют на 40% увеличить скорость передвижения на сложных поверхностях, вроде леса.
«Роботам нужна возможность быстро и эффективно передвигаться на естественных неровных покрытиях, чтобы попасть туда, куда могут попасть люди», — говорит ведущий исследователь Эмили Латроп.
Она и её коллеги продемонстрируют свою работу на виртуальной конференции RoboSoft, которая проходит с 15 мая по 15 июля.
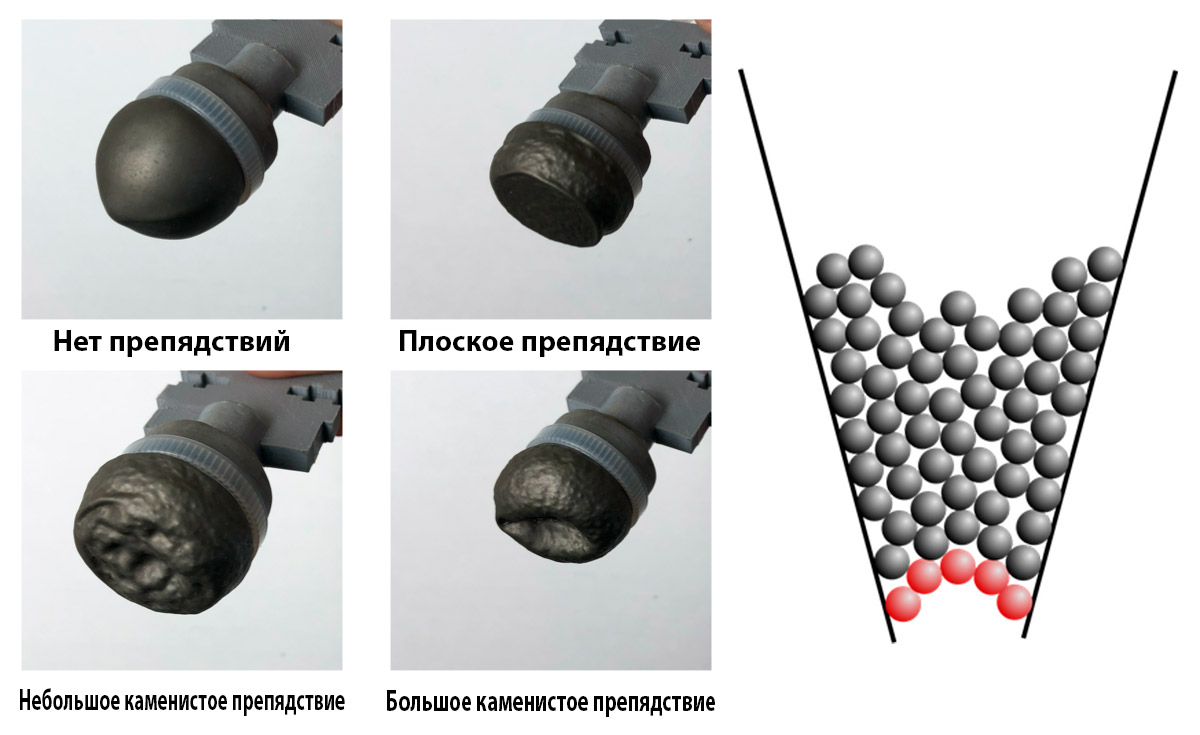
Чтобы создать такую обувь, пришлось обратиться за вдохновением к природе. После разработки гибких сфер с латексной мембраной учёные наполнили их кофейной гущей и небольшими структурами в форме корней растений. Благодаря физической концепции под названием «гранулированные пробки» (granular jamming), кофейная гуща может перемещаться вперёд и назад, одновременно ведя себя как твёрдое тело и как жидкость.
Пробки появляются, когда вырастает плотность частиц, что не даёт им течь. В результате материал начинает вести себя как твёрдое тело, пока пробка не будет устранена. На изображении пробка показана частицами красного цвета, которые не дают двигаться другим частицам. Другим примером является напряжение сдвига, которое отчасти объясняет, почему покрышки автомобиля ощущаются как твёрдое тело, хотя они заполнены воздухом.
Таким образом, когда ступни робота касаются поверхности, они затвердевают и повторяют форму поверхности. Когда робот поднимает свой вес, пробка в подошве устраняется до следующего контакта с землёй. Корневидные структуры помогают сохранять подошву твёрдой при наличии пробки.
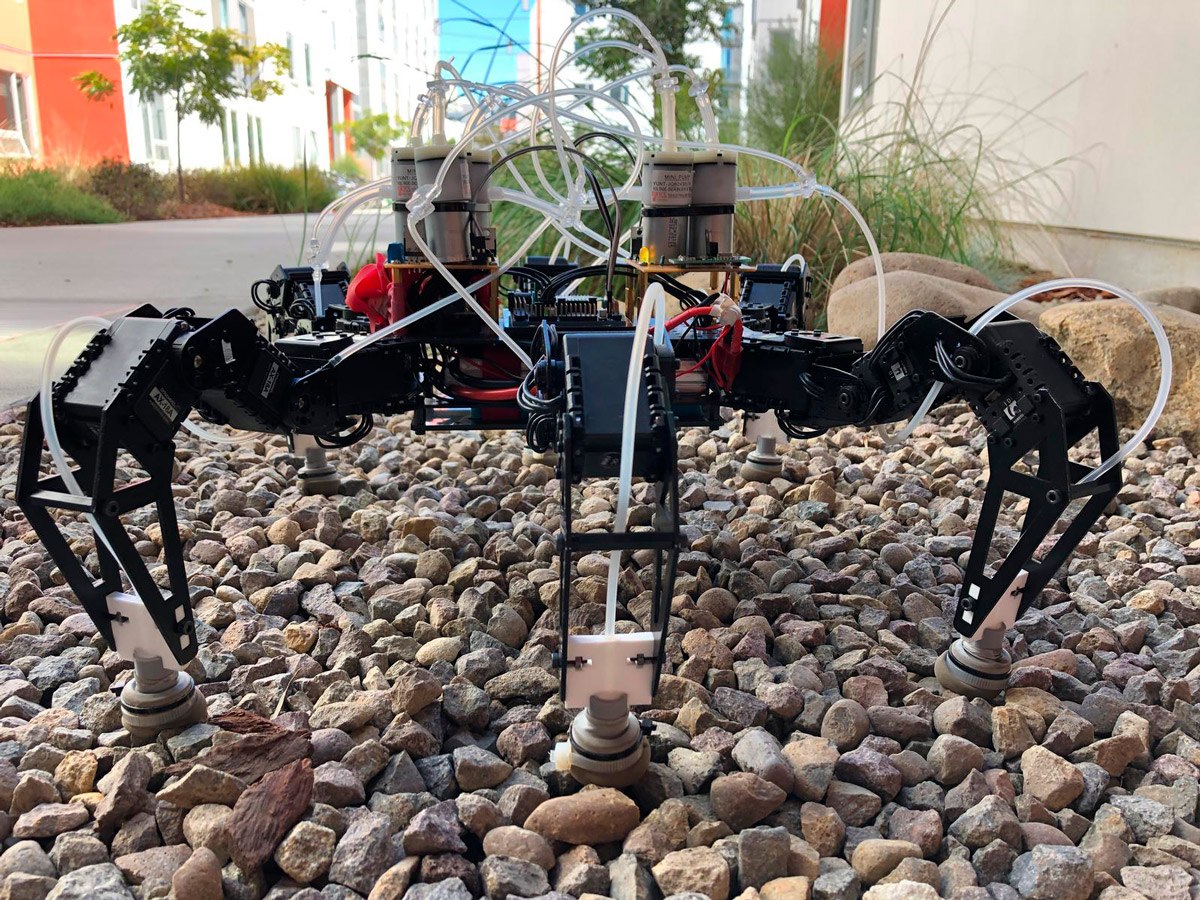
Для тестирования исследователи использовали доступного в продаже шестиногого робота. Затем они создали систему для получения отрицательного и положительного давления, чтобы контролировать сознание пробок. Эта система работает как пылесос, который втягивает воздух из кофейной гущи, чтобы уплотнять подошву.
Они протестировали эту подошву на плоских поверхностях, древесной стружке, гальке. Для сравнения проверялось движение робота по этим поверхностям без подошвы. При пассивном создании пробок, когда используется только вес ног робота и не используется вакуум, подошвы лучше всего работают на плоской поверхности. Если применять активное создание пробок, робот хорошо ходит по камням. В обоих случаях подошва помогает роботу лучше цепляться за поверхности, что увеличивает скорость его передвижения примерно на 40%.
«Природная среда наполнена сложными поверхностями, скользкими, каменистыми, топкими, которые затрудняют движение. Подошвы, которые могут адаптироваться к таким поверхностям, помогут роботам стать более мобильными».
Следующая задача разработчиков заключается во внедрении сенсоров в подошву. Это позволит электронной управляющей плате определять тип поверхности. Что даст возможность улучшить алгоритм управления для переключения между активным и пассивным созданием пробок.




