Автомобиль есть источник повышенной опасности. Это же более, чем справедливо, для беспилотных авто. Учитывая, что технологии, используемые в них, далеки от совершенства, можно быть уверенным, что такие машины представляют гораздо большую опасность. Такие машины двигаются, руководствуясь указаниями от датчиков и камер, анализирующих пространство перед автомобилем.
Становится понятно, что самоуправляемые машины совершенно «не видят», есть ли помехи движению при подъезде к сложным перекресткам, когда опасный участок оказывается вне досягаемости камер и лидаров. Однако, ученые нашли возможность «заглянуть за угол». Исследователи предлагают использовать для этого радиолокационные радары. Эта технология позволяет получать сравнительно точные данные об объектах, находящихся вне зоны видимости традиционного оборудования беспилотников.

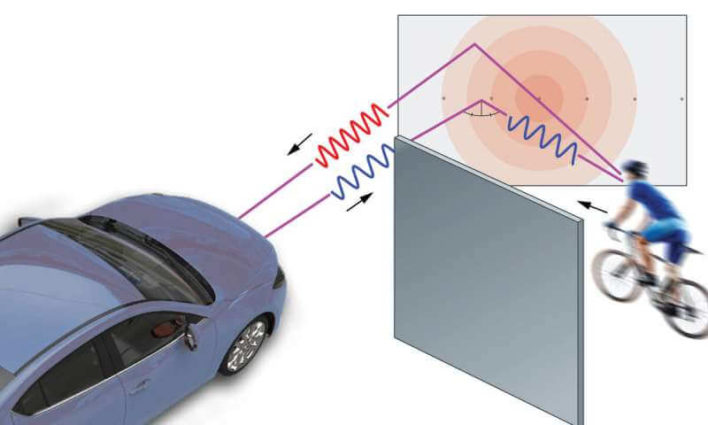
Сигнал от радара отражается от различных предметов – стен зданий, стоящих автомобилей. Отраженный сигнал достигает объекта, находящегося «за углом» и часть его возвращается к источнику. По характеристикам отраженного и полученного сигнала есть возможность понять, движется объект, или стоит, измерить скорость и направление движения и даже классифицировать – автомобиль, пешеход, или велосипедист.
Подобное решение является вполне перспективным, учитывая, что радарные датчики дешевле лидарных и довольно легко могут быть интегрированы в систему автомобиля. Вполне вероятно, что уже скоро они могут появиться в серийных самоуправляемых авто. Однако, перед этим инженерам придется решить, как минимум одну проблему – повысить пространственное разрешение радарных датчиков. Как уверяют разработчики, она может быть успешно решена вводом новых алгоритмов обработки, способными более точно и корректно интерпретировать отраженный от объекта сигнал.





Вот если б автомобили еще могли предугадать, куда же повернет водитель включив правый поворот, при этом перестроившись в левый ряд ;))))